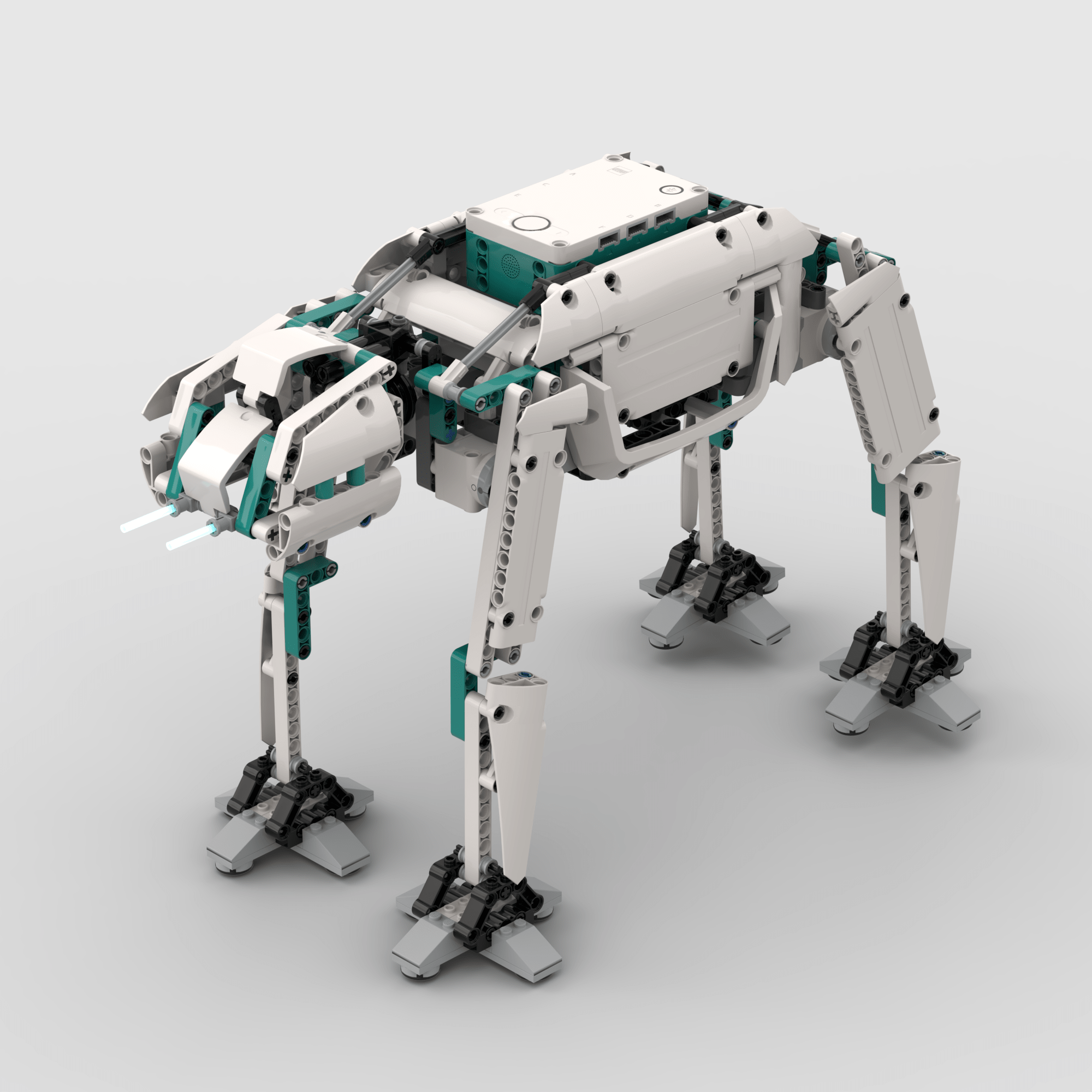
For this year’s May the 4th, I wanted to create something special. This is what I came up with: an All Terrain Armored Transport using the MINDSTORMS 51515 set, or AT-AT MS5 in short. There was a motorized AT-AT build in the Dark Side Developer Kit (9754). However, since it was released on 2000, I feel it was in urgent need of an update. What better than using the MINDSTORMS Robot Inventor set 51515. The robot was programmed using Python.
The Design • Instructions • Program • Showcase • Gallery
The Design
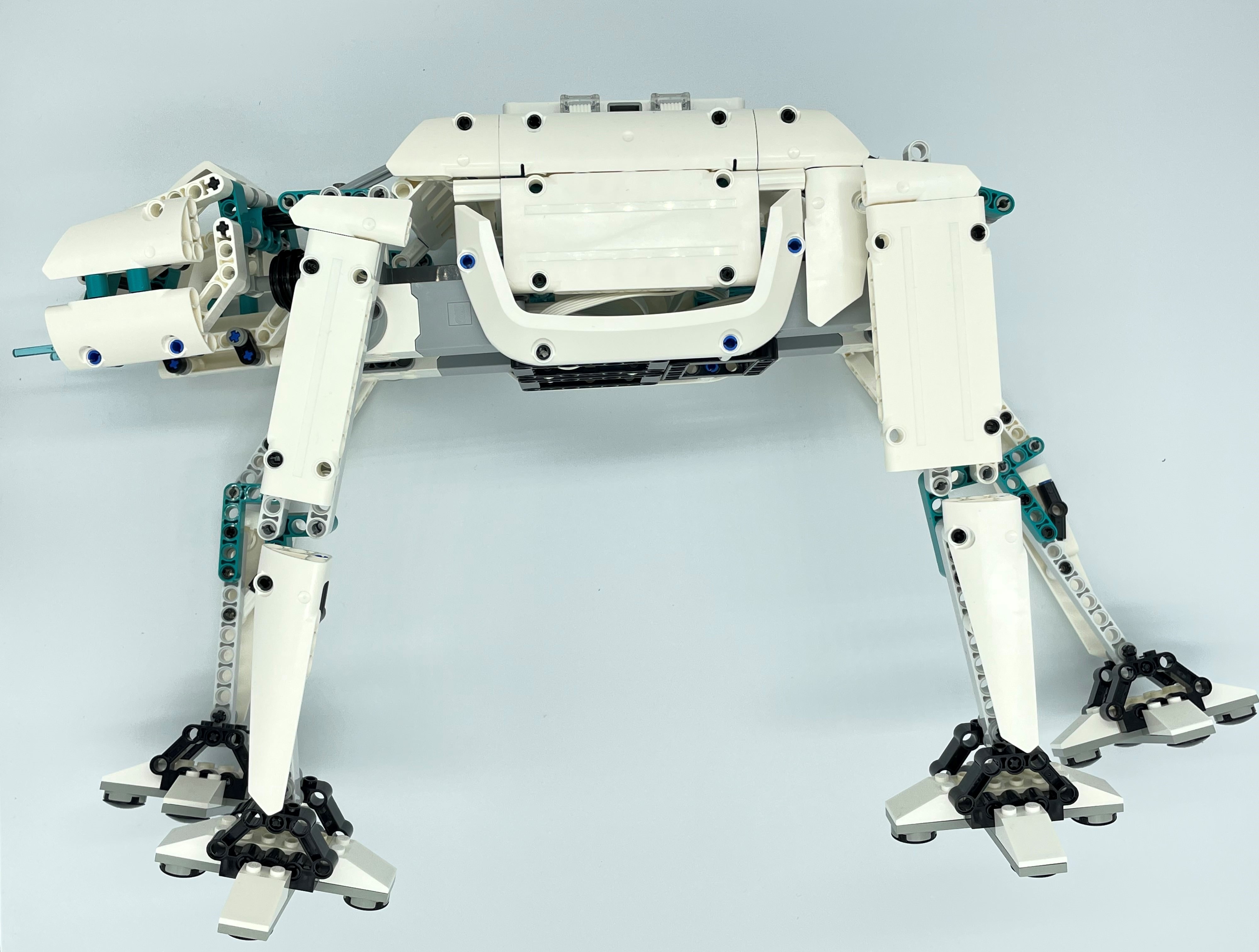
When designing the AT-AT MS5, my main objective was to give it a nice overhaul to make it look like a Robot Inventor-themed creation. Thus, I tried to make the build as “technic” as possible. For that purpose, I replaced almost all the studded parts with beams. Moreover, I tried to take advantage of the Robot Inventor’s panels to give the AT-AT a robust, smooth look.
In the following pictures you can see a comparison of the different parts (legs, head, body) of the original build against their MS5 counterpart.
 |
 |
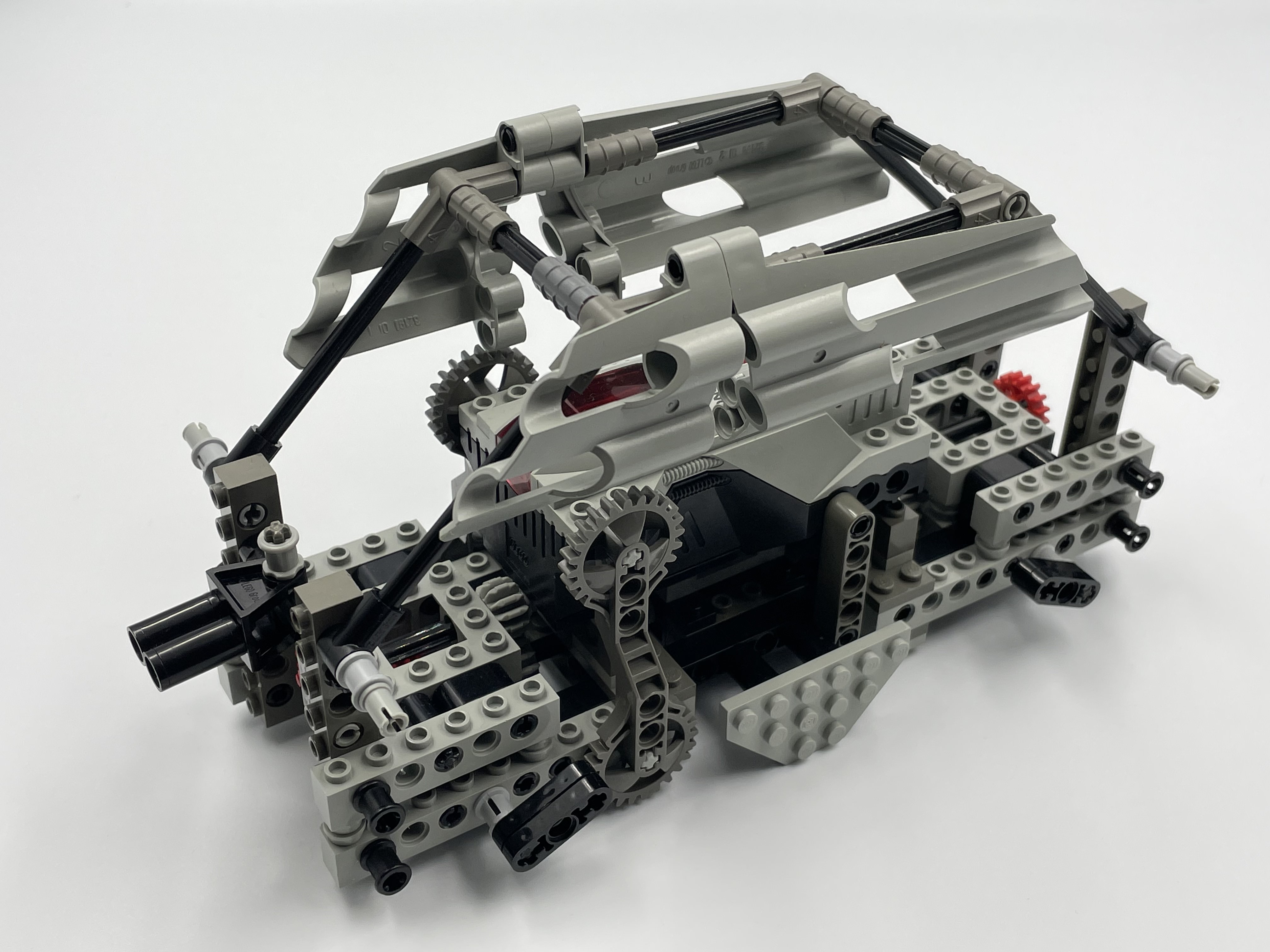 |
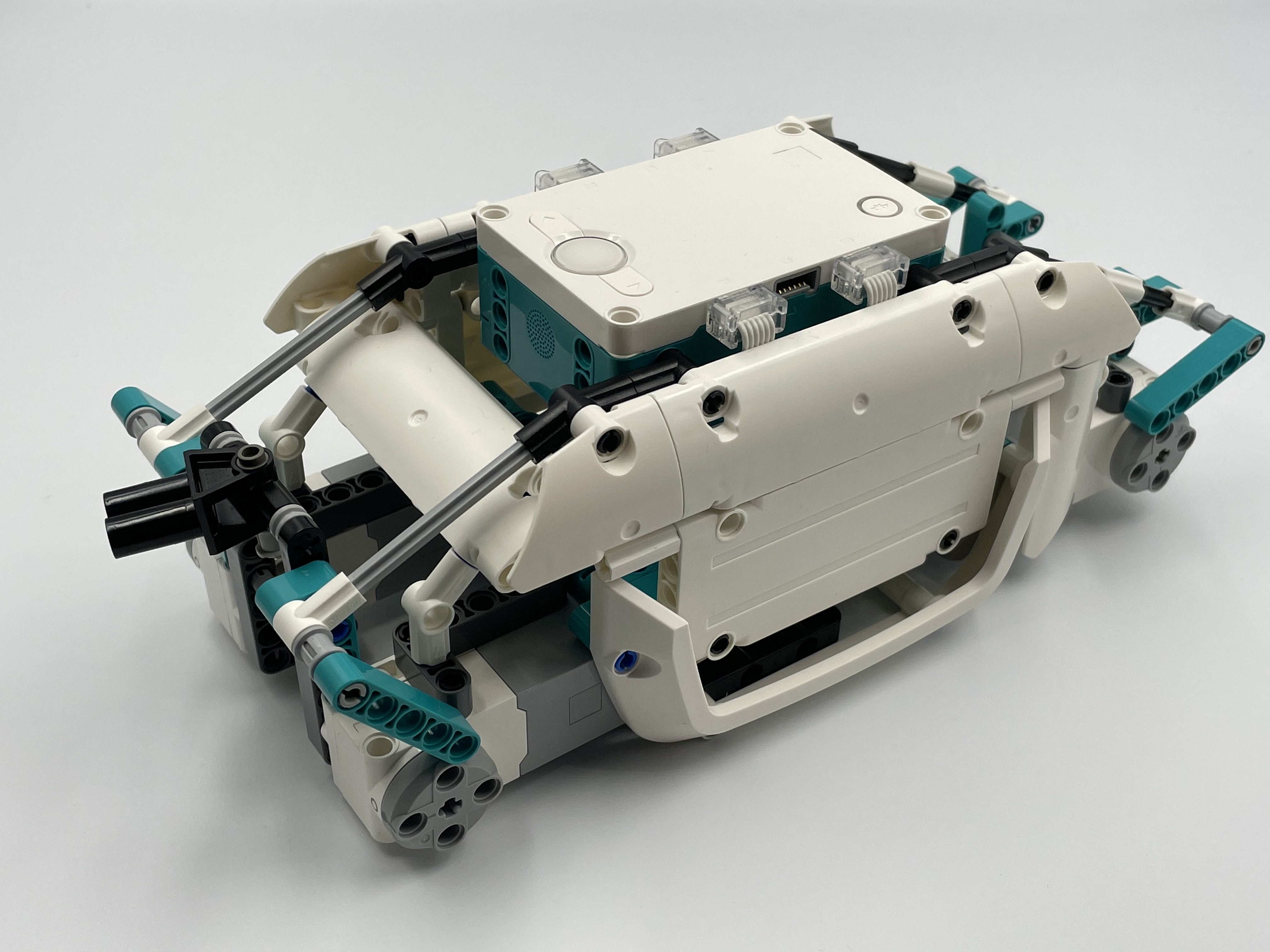 |
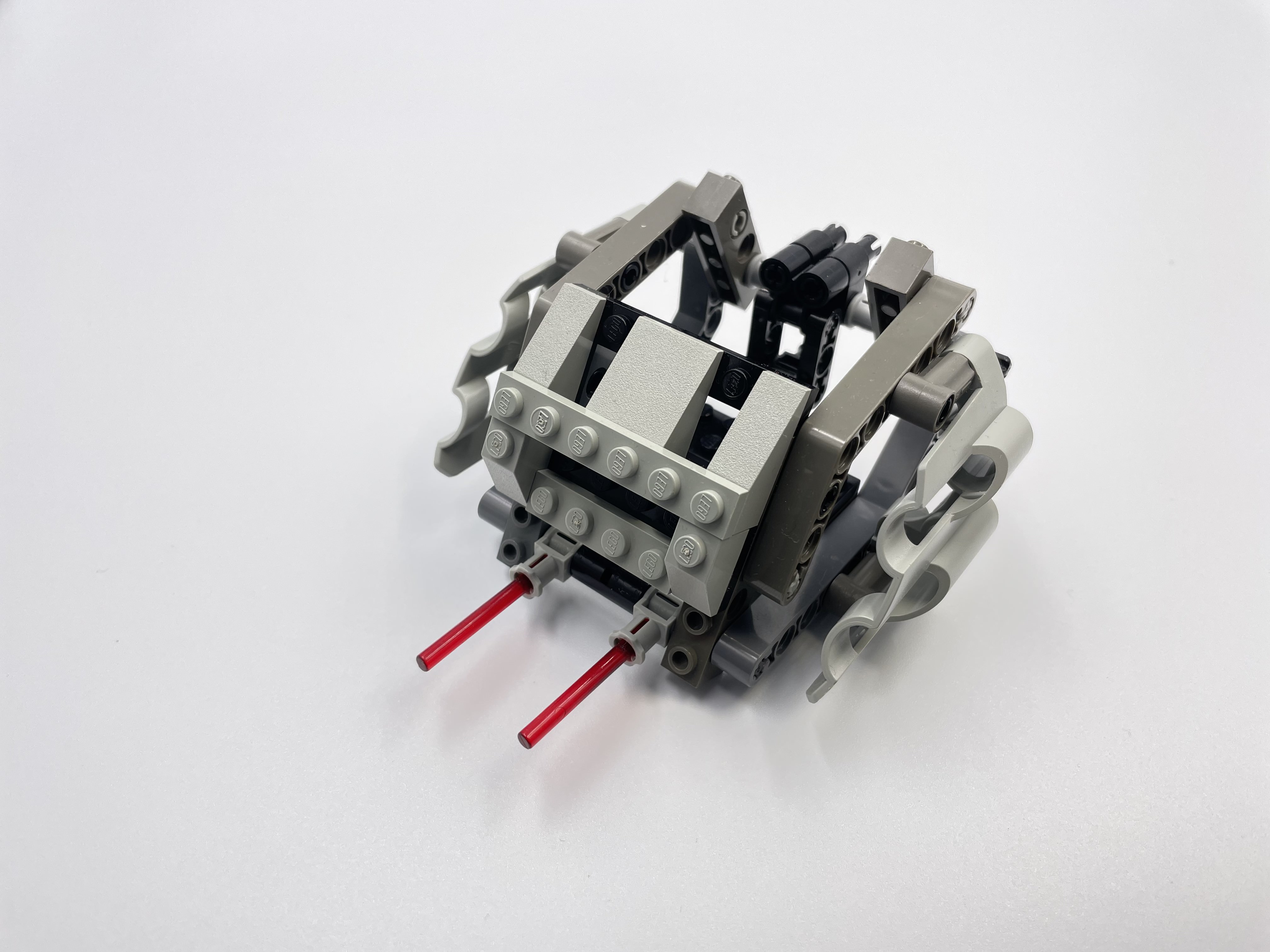 |
 |
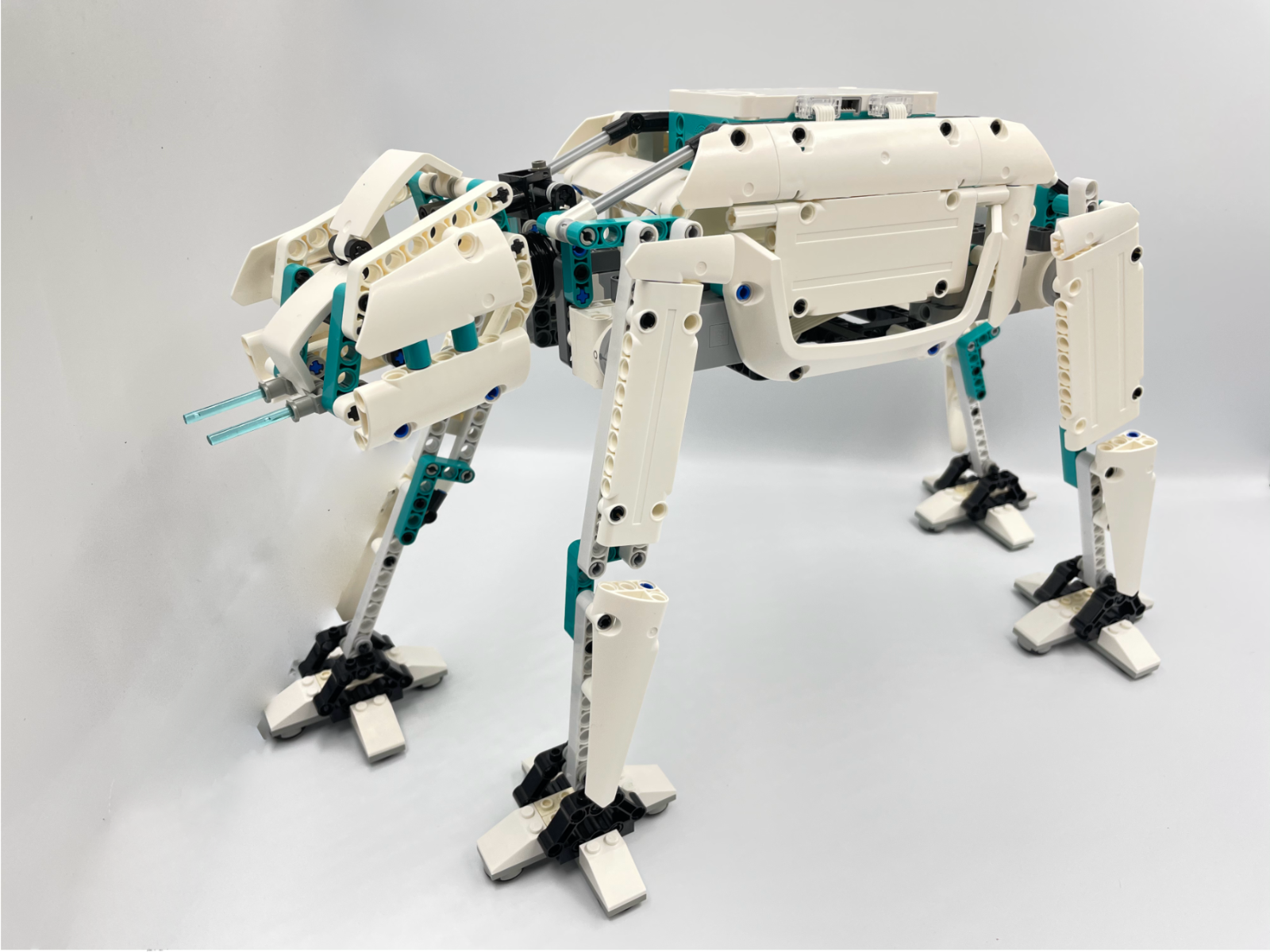
When we put everything together, this is how the AT-ATs look like:
 |
 |
 |
 |
Instructions
I generated the instructions using Bricklink Studio. You can find them here:

The instructions also include a bill of materials, in case you decide to build the AT-AT MS5 yourself. You can also find the inventory on its corresponding Rebrickable page.
Program
The robot functionality is quite simple. The AT-AT MS5 just walks in a straight line. However, what is quite interesting is how the motors are controlled. I programmed the robot in Python and used Anton’s Mindstorms motor synchronization technique. This method is a very clever way to make two (or more) motors work together smoothly. In short, we define mathematical functions that describe the motors’ movement (in this case, I defined piece-wise linear functions that describe the movement of each leg). This is particularly handy for the AT-AT MS5, since the legs movement have quite a peculiar pattern:

For a complete, detailed description of how this approach works, I strongly recommend checking the AT-AT MS5’s Jupyter notebook (if nbviewer is giving you trouble, you can also check the notebook directly in GitHub). If you just want to get the robot up and running, you can find the script here. To use it, just copy and paste the content of the script in a new MINDSTORMS Python project and you will be good to go.

Showcase
The best part: seeing the whole thing in action!

I love how the looked turned out. Unfortunately, as you can see, the AT-AT MS5 doesn’t perform very well on smooth surfaces 😅. I guess a redesign of the legs could have helped. However, I needed the pieces for another MOC, so I decided to leave it as it is. I have to admit that in the end it turned out quite funny.
Gallery
If you build this model, please share some pictures! I’d love to add them here.
If you have any questions, comments, or feedback, please open a discussion. If there is a problem with the code (e.g., mistake), please open an issue. Moreover, you can always drop me a line on Twitter (@amoncadatorres). Lastly, if you found this useful, fun, or just want to show your appreciation, you can always buy me a cookie. Cheers!